Rilevamento 3D su larga scala in un canyon montano per la progettazione ingegneristica e infrastrutturale
1. Introduzione
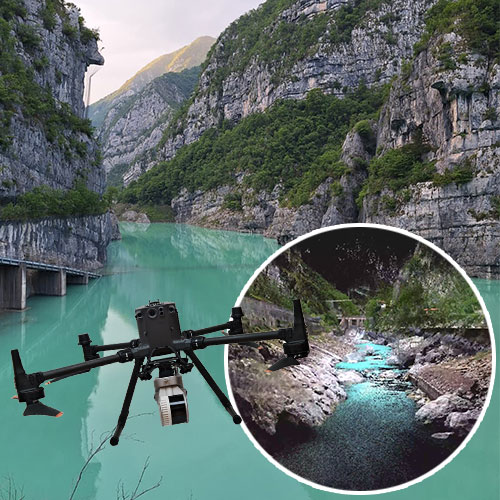
Nell’ambiente alpino della Valcellina, è stato rilevato un canyon/corridoio lungo 5 km utilizzando la tecnologia SLAM montata su drone per supportare studi ingegneristici e la pianificazione delle infrastrutture. Il rilevamento contribuisce a un progetto più ampio volto alla manutenzione della strada esistente e alla progettazione di un percorso ciclabile panoramico. L’iniziativa è stata realizzata in collaborazione con il Laboratorio di Geomatica CIRCE dell’Università IUAV di Venezia nell’ambito delle attività del SSIBAP . Il Laboratorio è diretto dalla professoressa Balletti e fornisce supporto tecnico e scientifico all’Ateneo e agli enti pubblici e privati.
2. La sfida
Il rilevamento di canyon lunghi e stretti presenta diverse difficoltà: occlusione del segnale GNSS, accesso limitato, elevata verticalità e vincoli ambientali. L’obiettivo era quello di acquisire un modello 3D denso e accurato dell’intero tratto, riducendo al minimo il controllo a terra e massimizzando la mobilità e la flessibilità sul campo. Dati precisi sono necessari per supportare i lavori infrastrutturali, valutare la stabilità dei pendii e progettare la futura pista ciclabile.


3. Soluzione adottata
L’intero rilevamento è stato eseguito utilizzando lo scanner SLAM Stonex X200GO, montato principalmente su una piattaforma UAV. Questo approccio ha consentito un’acquisizione efficiente nei segmenti di canyon all’aperto. Nelle sezioni di tunnel in cui il volo con il drone non era fattibile, l’X200GO è stato utilizzato in modalità portatile. Questa strategia hardware unificata ha garantito una qualità dei dati costante in diversi ambienti, mantenendo al contempo un’elevata mobilità.

4. Operazioni sul campo
- Area di rilevamento: corridoio del canyon lungo circa 5 km lungo una vecchia strada di montagna
- Missioni di volo: voli manuali multipli con UAV con strisce sovrapposte
- Sezioni del tunnel: rilevate a piedi utilizzando il dispositivo portatile X200GO
- Copertura RTK: non sempre possibile e utilizzata; ricostruzione completa basata principalmente sulla traiettoria SLAM
Le operazioni sono state completate con successo in un solo giorno lavorativo, grazie alla pianificazione efficiente e alla versatilità dello scanner X200GO. Una sequenza accuratamente coordinata di voli con UAV ha coperto tutti i segmenti all’aperto del canyon lungo 5 km, mentre le acquisizioni manuali sono state effettuate immediatamente dopo nelle aree del tunnel. L’uso di un unico dispositivo leggero sia per la scansione aerea che terrestre ha permesso al team di ridurre al minimo i cambi di attrezzatura e mantenere la continuità nella qualità dei dati. Nonostante la topografia impegnativa e la posizione remota, il flusso di lavoro semplificato ha permesso di eseguire l’intero rilevamento durante le ore diurne, con coerenza in tutti i segmenti del set di dati, su terreni e condizioni diverse.
5. Processamento dei dati
- Dati SLAM provenienti da modalità drone e portatile elaborati utilizzando GOpost
- Unione di segmenti basata su sovrapposizione e allineamento
- Pulizia e ottimizzazione eseguite in Cube-3d
- Possibili risultati finali:
- Nuvola di punti unificata dell’intero corridoio
- Modello digitale del terreno (DTM)
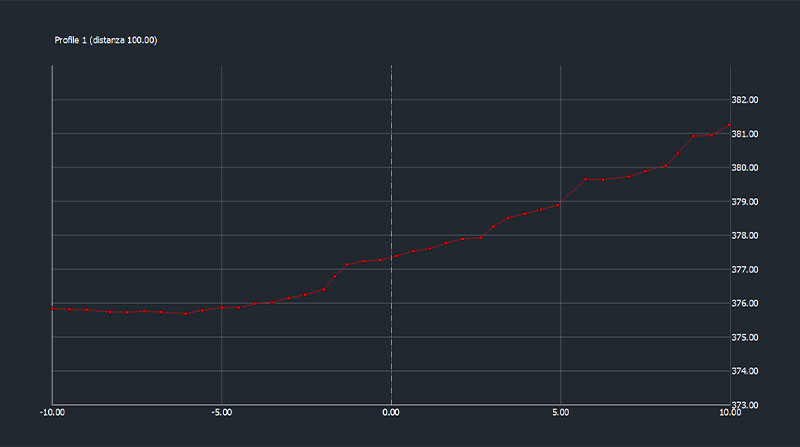
- Profili longitudinali e trasversali, analisi della pendenza e curve di livello
- Disegni 2D e 3D a supporto della pianificazione
6. Possibili risultati del rilievo
- Nuvola di punti continua e ad alta risoluzione dell’intero percorso del canyon
- Modellazione accurata del fondo stradale, dei pendii circostanti, dei muri di contenimento e delle gallerie
- Input affidabile per futuri lavori infrastrutturali, comprese le valutazioni di sicurezza e la progettazione civile
7. Applicazioni
- Manutenzione stradale: rilevamento delle deformazioni, analisi dello spazio libero, ispezione dei muri
- Progettazione di piste ciclabili: strato di base per la pianificazione dell’allineamento e la valutazione dei punti panoramici
- Monitoraggio dei rischi sui pendii: rilevamento precoce dell’erosione e delle superfici instabili
- Modellizzazione ambientale: analisi dei percorsi di deflusso, del drenaggio e dell’impatto della vegetazione
8. Collaborazione accademica
Il progetto è stato condotto in collaborazione con il Laboratorio CIRCE dell’Università IUAV di Venezia. Dottorandi e ricercatori hanno partecipato al lavoro sul campo e all’analisi dei dati, applicando concetti avanzati di rilevamento in un contesto geomorfologico reale.
9. Valore di ricerca
- Caso di studio per l’acquisizione di terreni complessi con supporto GNSS minimo
- Convalida dei flussi di lavoro SLAM basati su UAV per la documentazione delle infrastrutture lineari
- Integrazione dei dati SLAM aerei e portatili in una piattaforma unificata
10. Conclusioni
Il progetto del canyon della Valcellina dimostra la potenza e la versatilità dell’X200GO. Le sue capacità SLAM hanno permesso di documentare un complesso corridoio montano con precisione e continuità, nonostante i limiti del GNSS. Il set di dati supporterà il miglioramento delle infrastrutture civili, contribuendo al contempo alla ricerca accademica e alla formazione degli studenti nelle tecnologie avanzate di rilevamento 3D.