Large-Scale 3D Survey in a Mountain Canyon for Engineering and Infrastructure Planning
1. Introduction
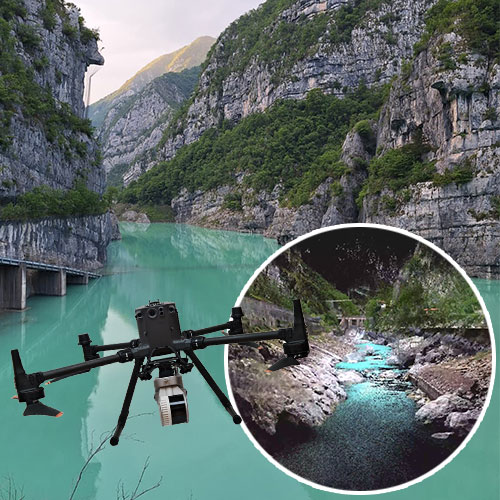
In the rugged alpine environment of Valcellina, a 5 km canyon corridor was surveyed using drone-mounted SLAM technology to support engineering studies and infrastructure planning. The survey contributes to a broader project aimed at maintaining the existing road and designing a panoramic cycling route. The initiative was carried out in collaboration with the CIRCE Geomatics Laboratory at the IUAV University of Venice as part of the SSIBAP activities. The Laboratory is directed by Professor Balletti and provides technical and scientific support to the University and public and private entities.
2. The Challenge
Surveying long and narrow canyons presents several difficulties: GNSS signal occlusion, limited access, high verticality, and environmental constraints. The goal was to acquire a dense and accurate 3D model of the entire stretch, minimizing ground control and maximizing mobility and flexibility in the field. Precise data was needed to support infrastructure works, assess slope stability, and design the future cycling path.


3. Adopted Solution
The entire survey was performed using the Stonex X200GO SLAM scanner, primarily mounted on a UAV platform. This approach allowed for efficient acquisition in open-air canyon segments. In tunnel sections where drone flight was not feasible, the X200GO was used in handheld mode. This unified hardware strategy ensured consistent data quality across different environments while maintaining high mobility.

4. Field Operations
- Survey Area: ~5 km canyon corridor along an old mountain road
- Flight Missions: Multiple UAV manual flights with overlapping strips
- Tunnel Sections: Surveyed on foot using handheld X200GO
- RTK Coverage: Not always possible and used; full reconstruction based primarily on SLAM trajectory
Operations were successfully completed in a single working day, thanks to efficient planning and the versatility of the X200GO scanner. A carefully coordinated sequence of UAV flights covered all open-air segments of the 5 km canyon, while handheld acquisitions were conducted immediately afterward in the tunnel areas. The use of a single, lightweight device for both aerial and terrestrial scanning allowed the team to minimize equipment changes and maintain continuity in data quality. Despite the challenging topography and remote setting, the streamlined workflow enabled the full survey to be executed within daylight hours, with consistency across all dataset segments, across varied terrain and conditions.
5. Data Processing
- SLAM data from drone and handheld modes processed using GOpost
- Merging of segments based on overlap and alignment
- Cleaning and optimization performed in Cube-3d
- Possible deliverables:
- Unified point cloud of the full corridor
- Digital Terrain Model (DTM)
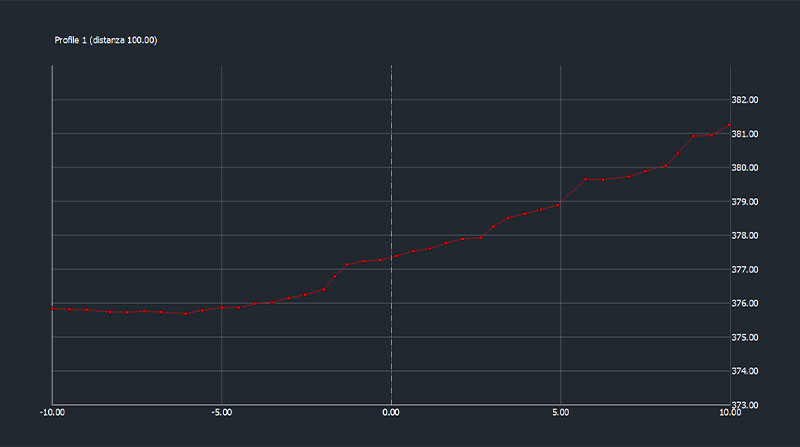
- Longitudinal and transverse profiles, slope analysis, and contour lines
- 2D and 3D drawings to support planning
6. Survey Possible Outcomes
- Continuous and high-resolution point cloud of the full canyon route
- Accurate modelling of the roadbed, surrounding slopes, retaining walls, and tunnels
- Reliable input for future infrastructure work, including safety assessments and civil design
7. Applications
- Road Maintenance: Deformation detection, clearance analysis, wall inspection
- Cycling Path Design: Base layer for alignment planning and panoramic point evaluation
- Slope Risk Monitoring: Early detection of erosion and unstable surfaces
- Environmental Modelling: Analysis of runoff paths, drainage, and vegetation impact
8. Academic Collaboration
The project was conducted in partnership with IUAV University of Venice, led by Prof. Francesco Guerra. PhD students and researchers participated in fieldwork and data analysis, applying advanced surveying concepts in a real-world geomorphological context.
9. Research Value
- Case study for complex terrain acquisition with minimal GNSS support
- Validation of UAV-based SLAM workflows for linear infrastructure documentation
- Integration of aerial and handheld SLAM data in a unified platform
10. Conclusions
The Valcellina canyon project demonstrates the power and versatility of the X200GO. Its SLAM capabilities made it possible to document a complex mountain corridor with precision and continuity, despite GNSS limitations. The dataset will support civil infrastructure improvements while contributing to academic research and student education in advanced 3D survey technologies.